刚体
1. 刚体运动学
质点系中任意两个质点的距离在运动过程中都保持不变. 体系质心有: \[\vec{R} = \frac{1}{M}m_k\vec{r}^k.\]
刚体的自由度:
- 1 个质点—3 个自由度;
- 2 个质点—5 个自由度;
- 3 个及以上—6 个自由度.
描述刚体运动所用的坐标系:
- 空间系
- 实验室坐标系,惯性系
- 本体系
- 在刚体任一点做原点 \(O\) 并固定在刚体上的坐标系. 从本体系观察, 刚体各点静止.
- 平动系
- 以\(O\)为原点,相对空间系平动的坐标系.
1.1. 刚体定点运动的矩阵表示
- 定点运动
- 有一点固定不动(基点),其他质点在满足刚体要求下随意运动.
- 刚体定点运动/转动
- 刚体中一点不动,刚体绕这一点任意转动.
建立平动系与本体系变换关系: 设平动系 \(\Sigma\) 的直角坐标基矢量为 \(\vec{e}_i\), 本体系 \(\Sigma^{\prime}\) 的直角坐标基矢量为 \(\vec{e}_i^{\prime}\), \(i = 1, 2, 3.\)
任取矢量 \(\vec{g} = g_i\vec{e}^i = g_i^{\prime}{\vec{e}^{\prime}}^i\). 可得: \[g_i^{\prime} = \vec{e}_i^{\prime}\cdot \vec{g} = g^j\vec{e}_i\cdot \vec{e}_j = a_{ij}g^j.\] 其中 \(a_{ij} = \vec{e}_i^{\prime}\cdot \vec{e}_j\), 称为 \(\Sigma^{\prime}\) 相对 \(\Sigma\) 的方向余弦. 易证: \[a_{ij}a_{\;k}^i = \delta_{kj}.\]
矩阵形式有: \[\vec{g}_{\Sigma} = \begin{bmatrix}g_1\\ g_2\\ g_3\end{bmatrix}, \;\vec{g}_{\Sigma^{\prime}} = \begin{bmatrix}g_1^{\prime}\\ g_2^{\prime}\\ g_3^{\prime}\end{bmatrix}, \;\mathcal{A} = \begin{bmatrix} a_{11}& a_{12}& a_{13}\\ a_{21}& a_{22}& a_{23}\\ a_{31}& a_{32}& a_{33} \end{bmatrix}.\] 变换矩阵 \(\mathcal{A}\) 满足 \(\vec{g}_{\Sigma^{\prime}} = \mathcal{A}\vec{g}_{\Sigma}\). 另外有: \[a_{ij}a^i_{\;k} = \delta_{kj}\Rightarrow \mathcal{A}^T\mathcal{A} = \mathcal{A}\mathcal{A}^T = \mathbf{I}_n.\] 即 \(\mathcal{A}\) 为正交矩阵, \(\vec{g}_{\Sigma^{\prime}} = \mathcal{A}\vec{g}_{\Sigma}\) 为正交变换. 定点运动可以用一个正交矩阵表示.
1.1.1. 正交矩阵群
定义乘法为普通矩阵的乘积, 则正交矩阵构成一个群.
- O(3) 群
- 三阶正交矩阵构成的群.
根据群乘法的封闭性, 正交阵之积仍为正交阵, 故连续的正交变换仍是正交阵. 即连续的定点运动仍是定点运动.
- 是否所有正交变换都可以表示顶点运动
即 \(O(3)\) 群中的任意一个元素是否都可以表征顶点运动.
答案是否定的. 易证对于任意 \(\mathcal{A}\in O(3)\), 有 \(\det \mathcal{A} = \pm 1\).
行列式为 \(-1\) 的正交变换必然包含一个反演变换 (右手系变为左手系), 无法描述定点运动.
- 行列式为\(+1\) — proper
- 行列式为\(-1\) — improper
易证有:
- 转动群 SO(3)
- 所有三阶 proper 正交矩阵 (行列式为\(+1\)) 构成的群.
刚体运动有:
- Euler 定理
定点转动等效于过基点某个轴的定轴转动.
实际上定点运动整个过程不可用定轴转动替代, 只是它产生的最终效果(从初态到末态), 可以用一个定轴转动的效果等价.
- Chasles 定理
刚体任意运动的最终效果,可以视为平动加绕平动方向的定轴转动.
注意还是最终效果,而不是运动过程的每一个瞬间的位形.
1.2. Euler 角
由前述, 定点运动可以用 SO(3) 矩阵 \(\mathcal{A}\) 来描述. \(\mathcal{A}\) 的矩阵元 \(A_{ij} = a_{ij}\) 为方向余弦, 显然九个方向余弦并不独立. \(a_{ij}a^i_{\;k}=\delta_{kj}\) 共有六个方程, ⇒ \(9-6=3\) 个独立参数.
由前 Euler 定理,任何定点运动的效果等价于一个过基点的定轴转动. 描述轴的取向需要两个参数 \((\alpha,\beta)\), 绕轴转过角度一个参数 \(\gamma\). 由于 \((\alpha,\beta)\) 难以确定, 实际上用三个 Euler 角 \((\phi,\theta,\psi)\).
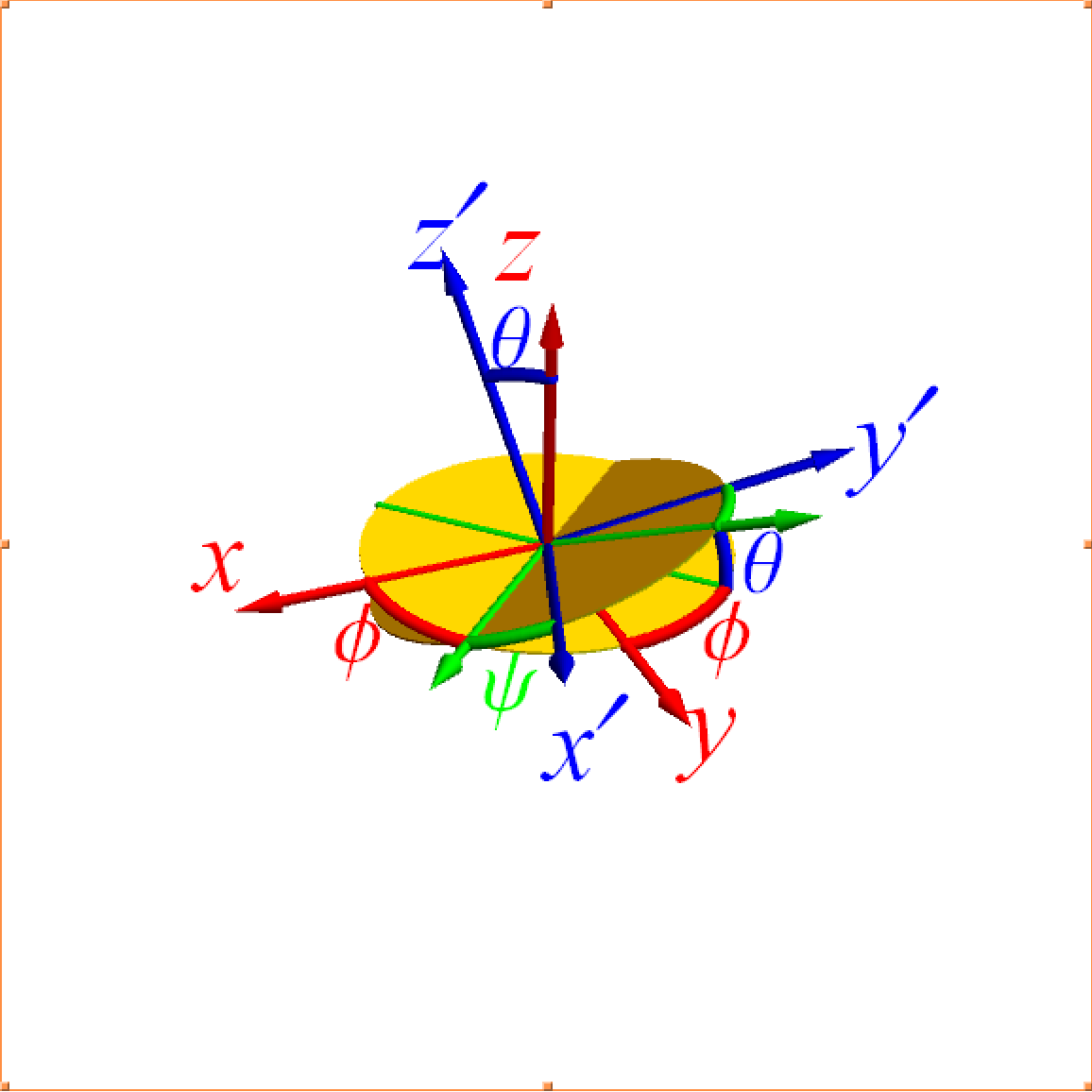
- Euler 角的定义
- 有正则变换
\((x, y, z)\Rightarrow (x^{\prime}, y^{\prime}, z^{\prime})\).
为三个正则变换之积:
- 坐标轴 \((x, y, z)\) 绕 \(z\) 轴旋转 \(\phi\), \(\mathcal{S}(x, y, z)\stackrel{\mathcal{D}}{\Rightarrow} \mathit{\Sigma}(\xi,\eta,\zeta)\). 变换矩阵\(\mathcal{D}\) 为: \[\mathcal{D} = \begin{pmatrix} \cos\phi & \sin\phi & 0\\ -\sin\phi & \cos\phi & 0\\ 0 & 0 & 1 \end{pmatrix}.\]
- 坐标系 \((\xi,\eta,\zeta)\) 绕 \(\xi\) 轴旋转 \(\theta\), \(\mathit{\Sigma}(\xi,\eta,\zeta)\stackrel{\mathcal{C}}{\Rightarrow} \mathit{\Sigma}^{\prime}(\xi^{\prime},\eta^{\prime},\zeta^{\prime}).\) 变换矩阵 \(\mathcal{C}\) 为: \[\mathcal{C} = \begin{pmatrix} 1 & 0 & 0\\ 0 & \cos\theta & \sin\theta\\ 0 & -\sin\theta & \cos\theta \end{pmatrix}.\]
- 坐标轴 \((\xi^{\prime},\eta^{\prime},\zeta^{\prime})\) 绕 \(\zeta^{\prime}\) 旋转\(\psi\), \(\mathit{\Sigma}^{\prime}(\xi^{\prime},\eta^{\prime},\zeta^{\prime}) \stackrel{\mathcal{B}}{\Rightarrow} \mathcal{S}^{\prime}(x^{\prime},y^{\prime},z^{\prime}).\) 变换矩阵 \(\mathcal{B}\) 为: \[\mathcal{B} = \begin{pmatrix} \cos\psi & \sin\psi & 0\\ -\sin\psi & \cos\psi & 0\\ 0 & 0 & 1 \end{pmatrix}.\]
故\((x, y, z)\Rightarrow (x^{\prime}, y^{\prime}, z^{\prime})\) 的变换矩阵 \(\mathcal{A}_E = \mathcal{B}\mathcal{C}\mathcal{D}\) 为: \[\mathcal{A}_E = \begin{pmatrix} \cos\psi\cos\phi - \cos\theta\sin\psi\sin\phi & \cos\psi\sin\phi + \cos\theta\sin\psi\cos\phi & \sin\psi\sin\theta \\ -\sin\psi\cos\phi - \cos\theta\cos\psi\sin\phi & -\sin\psi\sin\phi + \cos\theta\cos\psi\cos\phi & \cos\psi\sin\theta \\ \sin\theta\sin\phi & -\sin\theta\cos\phi & \cos\theta \end{pmatrix}.\] 因为 \(\mathcal{A}_E\) 是正交矩阵, 故 \(\mathcal{A}_E^{-1} = \mathcal{A}_E^T\).
由前述可得 Euler 叫的变化范围:
- 进动角 \(\phi\): \([0, 2\pi]\),
- 章动角 \(\theta\): \([0, \pi]\),
- 自转角 \(\psi\): \([0, 2\pi]\).
1.3. 无限小转动 定点转动的角速度
无穷小时间内刚体取向的无穷小变化.
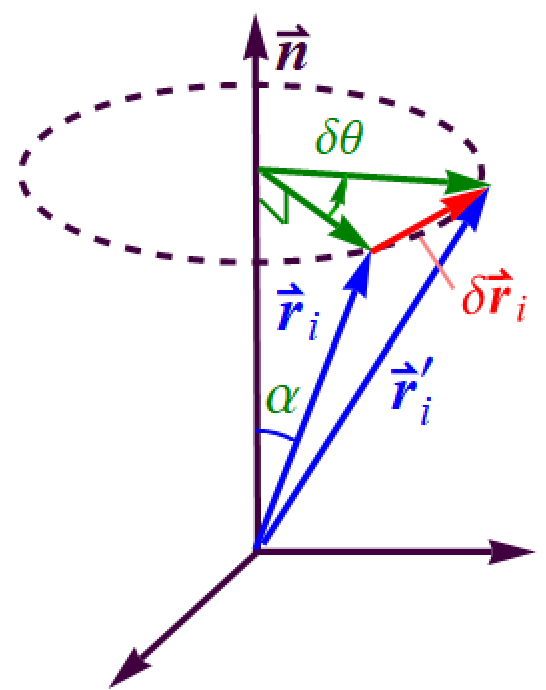
刚体的一个质点 \(i\) 绕单位矢量 \(\vec{n}\) 确定的转轴作 定轴转动, 当转过无穷小角度 \(\delta\theta\) 时, 质点位置矢量变化 \(\delta\vec{r}_i\) 有: \[|\delta \vec{r}_i| = \left| \vec{r}_i^{\prime} - \vec{r}_i \right| = r_i\sin\alpha\delta\theta = \left| \left( \vec{n}\times \vec{r}_i \right)\delta\theta \right|.\] \[\delta \vec{r}_i = \delta\theta\left( \vec{n}\times \vec{r}_i \right).\]
设刚体绕轴 \(\vec{n}\) 逆时针旋转 \(\mathrm{d}\Phi\), 一般矢量 \(\vec{g}\) 变为 \(\vec{g}^{\prime} = \vec{g} + \mathrm{d}\Phi \vec{n}\times \vec{g}\). 记 \(\mathrm{d}\vec{\Omega} = \mathrm{d}\Phi \vec{n}\), \(\vec{g}^{\prime} = \vec{g}\mathrm{d}\vec{\Omega}\times \vec{g}\). 连续分别绕 \(\vec{n}_1, \vec{n}_2\) 做两次定轴转动, 则:
\begin{aligned} \vec{g}^{\prime\prime} &= \vec{g}^{\prime} + \mathrm{d}\vec{\Omega}_2\times\vec{g}^{\prime}\\ &= \vec{g} + \left( \mathrm{d}\vec{\Omega}_1 + \mathrm{d}\vec{\Omega}_2 \right) \times \vec{g}\\ &= \vec{g} + \mathrm{d}\vec{\Omega}_{12} \vec{g}. \end{aligned}上式省去高阶小量. 易证连续的无限小转动是可对易的: \(\mathrm{d}\vec{\Omega}_{12} = \mathrm{d}\vec{\Omega}_{21}\).
描述连续的无穷小定轴转动的矢量等于描述各个无限小转动的矢量和: \(\mathrm{d}\vec{\Omega}_{12} = \mathrm{d}\vec{\Omega}_1 + \mathrm{d}\vec{\Omega}_2\).
无穷小定点运动可以由正交矩阵描述. \[\vec{g}_{\Sigma}^{\prime} = \mathcal{A}\vec{g}_{\Sigma} = (\mathcal{I}_n + \varepsilon)\vec{g}_{\Sigma}.\] 其中 \(\varepsilon\) 为一个无穷小矩阵. 忽略高阶小量, 有: \[ \mathcal{A}_1\mathcal{A}_2 = (\mathcal{I}_n + \varepsilon_1)(\mathcal{I}_n + \varepsilon_2) = I_n + \varepsilon_1 + \varepsilon_2 = \mathcal{A}_2 \mathcal{A}_1.\] 可得: 两个连续的无限小定点运动也是可对易的. (仅对于可略去二阶小量的无限小定点运动而言)
\(\mathcal{A}\) 正交, \(\mathcal{A}\mathcal{A}^T = \mathcal{I}_n\),可得: \[(\mathcal{I}_n +\varepsilon)(\mathcal{I}_n + \varepsilon^T) = \mathcal{I}_n + \varepsilon + \varepsilon^T = \mathcal{I}_n.\] 即 \(\varepsilon^T = -\varepsilon\), \(\varepsilon\) 是反对称矩阵: \[\varepsilon = \begin{pmatrix} 0 & \alpha & \beta \\ -\alpha & 0 & \gamma \\ -\beta & -\gamma & 0 \\ \end{pmatrix}.\] 如上式, 表征\(\varepsilon\)需要三个参量.
对于无穷小定轴转动 \(\vec{g}^{\prime} = \vec{g}+\mathrm{d}\vec{\Omega}\times \vec{g}\), 展开外积:
\begin{aligned} \vec{g}^{\prime} &= \vec{g} + \sum_{i,j,k}\epsilon_{ijk} (\mathrm{d}\Omega_j g_k - \mathrm{d}\Omega_k g_j)\vec{e}_i\\ &= \begin{bmatrix} g_1 \\ g_2 \\ g_3 \end{bmatrix} + \begin{bmatrix} n_2g_3 - n_3g_2 \\ n_3g_1 - n_1g_3 \\ n_1g_2 - n_2g_1 \end{bmatrix} \mathrm{d}\Phi \end{aligned}对于无穷小定点转动, \(\vec{g}^{\prime} = (\mathcal{I}_n +\varepsilon)\vec{g}\), 代入 \(\varepsilon\) 的反对称矩阵形式: \[\vec{g}^{\prime} = \begin{bmatrix} g_1 \\ g_2 \\ g_3 \end{bmatrix} + \begin{bmatrix} \beta g_3 - \alpha g_2 \\ -\alpha g_1 + \gamma g_3 \\ -\gamma g_2 - \beta g_1 \end{bmatrix} \] 联立可得: \[\varepsilon = \begin{pmatrix} 0 & -n_3 & n_2 \\ n_3 & 0 & -n_1 \\ -n_2 & n_1 & 0 \\ \end{pmatrix}\mathrm{d}\Phi. \] 故可得: 无限小定点转动不仅可以用正交矩阵表示,也可以用一个矢量表示.
1.3.1. 矢量的时间变化率
一般而言, 矢量的时间变化率与参照系有关. 本小节讨论矢量的时间变化率在不同参考系中之间的关系.
在 \(\mathrm{d}t\) 时间内, \(\vec{g}\) 变化 \(\mathrm{d}\vec{g}\). 有: \[(\mathrm{d}\vec{g})_{\text{internal}} = (\mathrm{d}\vec{g})_{\text{body}} + (\mathrm{d}\vec{g})_{\text{rot}}.\] 其中
- \((\mathrm{d}\vec{g})_{\text{internal}}\) 表示平动系中观察到的矢量变化 (不考虑刚体平动, 平动系为惯性系),
- \((\mathrm{d}\vec{g})_{\text{body}}\) 表示本体系中观察到的矢量变化,
- \((\mathrm{d}\vec{g})_{\text{rot}}\) 为本体系相对于平动系顶点运动导致的矢量变化.
由前述, 无限小定点运动可以用矢量表示: \((\mathrm{d}\vec{g})_{\text{rot}} = \mathrm{d}\vec{\Omega}\times \vec{g}\). 可得: \[(\frac{\mathrm{d}\vec{g}}{\mathrm{d}t})_{\text{internal}} = (\frac{\mathrm{d}\vec{g}}{\mathrm{d}t})_{\text{body}} + \frac{\mathrm{d}\vec{\Omega}}{\text{d}t}\times \vec{g}, \;\frac{\mathrm{d}\vec{\Omega}}{\mathrm{d}t} = \frac{\mathrm{d}\Phi}{\mathrm{d}t}\vec{n} = \vec{\omega}.\] 其中 \(\vec{\omega}\) 即为刚体的瞬时定轴转动角速度.
1.3.2. 角速度矢量的唯一性
已知: \[\left( \frac{\mathrm{d}\vec{g}}{\mathrm{d}t} \right)_{\text{internal}} = \left( \frac{\mathrm{d}\vec{g}}{\mathrm{d}t} \right)_{\text{body}} + \vec{\omega}\times\vec{g}.\]
- 表征时间变化率的瞬时角速度是否与基点选择有关?
- 可以证得: 刚体瞬时角速度是唯一的,与基点选择无关.
1.3.3. 角速度表示为 Euler 角
瞬时角速度可以看作一个定轴转动 \(\vec{\omega} = \omega\vec{n}\), 也可以分解成三个定轴转动(可加性、交换性). 同时,三个 Euler 角可以描述任意定点运动的初态和末态. ⇒ 可以用 Euler 角各自的转动速度合成顶点运动瞬时角速度.
- \(\vec{\omega} = \omega n_i \vec{e}^i\), 瞬时角速度视作三个定轴转动.
- \(\vec{\omega} = \sum_{\text{sub}=\phi,\theta,\psi}\vec{\omega}_{\text{sub}}\), 瞬时角速度用 Euler 角表示 (也是三个定轴转动).
欲求 \(\vec{\omega}_{\phi}\), 固定 \(\theta, \psi\), 改变 \(\phi\) (绕 \(z\) 轴旋转)⇒ \(\left( \vec{\omega}_{\phi} \right)_S = \vec{\phi}\vec{e}_3\), \(\vec{e}_3\) 为平动系基矢. \[\left( \vec{\omega}_{\phi} \right)_{S^{\prime}} = \mathcal{A}_E \begin{bmatrix} 0 \\ 0 \\ \dot{\phi} \end{bmatrix} = \begin{bmatrix} \dot{\phi}\sin\psi\sin\theta \\ \dot{\phi}\cos\psi\sin\theta \\ \dot{\phi}\cos\theta \end{bmatrix}.\] 同理可得 \(\vec{\omega}_{\theta}, \vec{\omega}_{\psi}\): \[\left( \vec{\omega}_{\theta} \right)_{S^{\prime}} = \begin{bmatrix}\dot{\theta}\cos\psi \\ -\dot{\theta}\sin\psi \\ 0\end{bmatrix},\; \left( \vec{\omega}_{\psi} \right)_{S^{\prime}} = \begin{bmatrix}0 \\ 0 \\ \dot{\psi}\end{bmatrix}.\] 三项相加可得: \[\vec{\omega}_{S^{\prime}} = \sum_{\text{sub} = \phi,\theta,\psi} \left( \vec{\omega}_{\text{sub}} \right)_{S^{\prime}} = \begin{bmatrix} \dot{\phi}\sin\psi\sin\theta + \dot{\theta}\cos\psi \\ \dot{\phi}\cos\psi\sin\theta - \dot{\theta}\sin\psi \\ \dot{\psi} + \dot{\phi}\cos\theta \end{bmatrix}.\] 上式即为 Euler 运动学方程. 另外 \[\vec{\omega}_S = \mathcal{A}_E^T \vec{\omega}_{S^{\prime}} = \begin{bmatrix} \dot{\psi}\sin\phi\sin\theta + \dot{\theta}\cos\phi \\ \dot{\psi}\cos\phi\sin\theta - \dot{\theta}\sin\phi \\ \dot{\phi} + \dot{\psi}\cos\theta \end{bmatrix}.\]
1.4. 转动群和无穷小生成元
三维空间转动群 SO(3) 的所有矩阵可以表示为 \[\mathcal{R}(\vec{\alpha}) = \mathrm{e}^{\vec{\alpha}\cdot \vec{\mathcal{J}}}\] 其中 \(\vec{\alpha} = \alpha \vec{n}\).
1.5. 转动参考系的动力学
设 \(\mathit{\Sigma}\) 和 \(\mathit{\Sigma}^{\prime}\) 两参考系有共同原点. \(\mathit{\Sigma}\) 为惯性系, \(\mathit{\Sigma}^{\prime}\) 以角速度 \(\vec{\omega}\) 转动. 设质点 \(m\) 的位置矢量为 \(\vec{r}\). 在 \(\mathit{\Sigma}\)-系中有运动方程: \[m \left( \frac{\mathrm{d}^2 \vec{r}}{\mathrm{d}t^2} \right)_{\mathit{\Sigma}} = \vec{F}.\] 其中 \(\vec{F}\) 为质点上总力. 由矢量的时间变化率可知有: \[\vec{v}_{\text{inner}} = \left( \frac{\mathrm{d} \vec{r}}{\mathrm{d}t} \right)_{\mathit{\Sigma}} = \left( \frac{\mathrm{d} \vec{r}}{\mathrm{d}t} \right)_{\mathit{\Sigma}^{\prime}} + \vec{\omega}\times \vec{r} = \vec{v} + \vec{\omega}\times \vec{r}. \] 其中 \(\vec{v}_{\text{inner}}\) 表示质点在惯性系 \(\mathit{\Sigma}\) 中的速度, \(\vec{v}\) 表示质点在转动系 \(\mathit{\Sigma}^{\prime}\) 中的速度. 从 \(\mathit{\Sigma}\) 和 \(\mathit{\Sigma}^{\prime}\) 原点重合可得: \[\vec{r}_{\mathit{\Sigma}} = \vec{r}_{\mathit{\Sigma}^{\prime}} = \vec{r}\] 其中 \(\vec{r} = x^i\vec{e}_i = {x^{\prime}}^i\vec{e}_i^{\prime}\), 同一矢量在不同系中分量不同. \(\vec{r}\) 在 \(\mathit{\Sigma}\)-系中对时间的二阶导有:
\begin{aligned} \left( \frac{\mathrm{d}^2\vec{r}}{\mathrm{d}t^2} \right) &= \left( \frac{\mathrm{d} \vec{v}_{\text{inner}}}{\mathrm{d}t} \right)_{\mathit{\Sigma}}\\ &=\left( \frac{\mathrm{d} \vec{v}_{\text{inner}}}{\mathrm{d}t} \right)_{\mathit{\Sigma}^{\prime}} + \vec{\omega}\times \vec{v}_{\text{inner}}\\ &= \left( \frac{\mathrm{d}\left( \vec{v}+\vec{\omega}\times \vec{r} \right)}{\mathrm{d}t} \right) _{\mathit{\Sigma}^{\prime}} + \vec{\omega}\times\left( \vec{v}+\vec{\omega}\times \vec{r} \right)\\ &= \left( \frac{\mathrm{d}\vec{v}}{\mathrm{d}t} \right)_{\mathit{\Sigma}^{\prime}} + \left( \frac{\mathrm{d}\vec{\omega}}{\mathrm{d}t} \right)_{\mathit{\Sigma}^{\prime}} \times \vec{r} + \vec{\omega}\times \left( \frac{\mathrm{d}\vec{r}}{\mathrm{d}t} \right)_{\mathit{\Sigma}^{\prime}} + \vec{\omega}\times \vec{v} + \vec{\omega}\times \left( \vec{\omega}\times\vec{r} \right)\\ &= \left( \frac{\mathrm{d}\vec{v}}{\mathrm{d}t} \right)_{\mathit{\Sigma}^{\prime}} + \left( \frac{\mathrm{d}\vec{\omega}}{\mathrm{d}t} \right)\times\vec{r} + 2\vec{\omega}\times\vec{v} + \vec{\omega}\times \left( \vec{\omega}\times\vec{r} \right). \end{aligned}质点在 \(\mathit{\Sigma}^{\prime}\) 系加速度有: \(\vec{a} = \left( \frac{\mathrm{d}\vec{v}}{\mathrm{d}t} \right)_{\mathit{\Sigma}^{\prime}}\) 且 \(\left( \frac{\mathrm{d}^2 \vec{r}}{\mathrm{d}t} \right)_{\mathit{\Sigma}} = \frac{\vec{F}}{m}\). 可得: \[m\vec{a} = \vec{F} + 2m\vec{v}\times\vec{\omega} + m\vec{\omega}\times \left( \vec{r}\times \vec{\omega}\right) + m\vec{r}\times \frac{\mathrm{d}\vec{\omega}}{\mathrm{d}t}\] 可得: 对转动系 \(\mathit{\Sigma}^{\prime}\) 的观察者而言, 质点除了受到实际力 \(\vec{F}\), 还受到了以下几个等效力:
- 科里奥利力: \(2m \vec{v}\times\vec{\omega}\),
- 离心力: \(m\vec{\omega}\times \left( \vec{r}\times\vec{\omega} \right)\);
- 欧拉力: \(m \vec{r}\times \mathrm{d}\vec{\omega}/\mathrm{d}t\).
1.5.1. 转动地球上的动力学—科里奥利力
2. 刚体动力学
2.1. 刚体定点转动角动量、动能、转动惯量
刚体的运动方程总可以写成: \[\frac{\mathrm{d}\vec{P}}{\mathrm{d}t} = \vec{F},\; \frac{\mathrm{d}\vec{L}}{\mathrm{d}t} = \vec{N}.\]
- 第一个方程仅在惯性系中成立,
- 第二个方程在计算角动量和力矩的参考点静止于惯性系/取在刚体质心时成立.
上式中矢量 \(\vec{L}\) 为总角动量.
- 角动量
记惯性系中静止参考点或质心为\(O\),则总角动量表示为: \[\vec{L} = \vec{r}_k\times\vec{p}^k = m\vec{r}_k\times \vec{v}^k, \;\vec{v}_k = \left( \frac{\mathrm{d}\vec{r}_k}{\mathrm{d}t} \right)_{\mathit{\Sigma}}.\] 由前述: \[\left( \frac{\mathrm{d}\vec{r}_k}{\mathrm{d}t} \right)_{\mathit{\Sigma}} = \left( \frac{\mathrm{d}\vec{r}_k}{\mathrm{d}t} \right)_{\mathit{\Sigma}^{\prime}} + \vec{\omega}\times \vec{r}_k = \vec{\omega}\times \vec{r}_k.\] \(\vec{r}_k\) 在惯性系中为常矢量, 故对时间导数取零. 可得:
\begin{aligned} \vec{L} &= m \vec{r}_k\times \vec{v}^k = m \vec{r}_k\times \left( \vec{\omega}\times \vec{r}_k \right)\\ &=m \left[ \left( \vec{r}_k\cdot\vec{r}^k \right)\vec{\omega} - \left( \vec{\omega}\cdot \vec{r}_k \right)\vec{r}^k \right]\\ &=m \left[ \left( \vec{x}_{(k)}^T\vec{x}^{(k)} \right)\vec{\omega} - \vec{x}^{(k)}\left( \vec{x}_{(k)}^T\vec{\omega} \right) \right]\\ &=m \left[ \left( \vec{x}_{(k)}^T\vec{x}^{(k)} \right)\mathbf{I}_3 - \vec{x}^{(k)}\vec{x}_{(k)}^T\right]\vec{\omega}. \end{aligned}- 惯性张量
定义刚体对 \(O\) 的惯性张量为 \(\mathbb{I}\): \[\mathbb{I} = m\left[ \left( \vec{x}_{(k)}^T\vec{x}^{(k)} \right)\mathbf{I}_3 - \vec{x}^{(k)}\vec{x}_{(k)}^T\right].\] 其中 \(I_{ij} = m_k \left[ {r^k}^2\delta_{ij} - x_i^{(k)}x_j^{(k)} \right]\). 易证 \(I_{ij} = I_{ji}\), 即 \(\mathbb{I}^T = \mathbb{I}\), 惯性矩阵是对称阵.
将刚体看作连续体,则有: \[\vec{r}_k\rightarrow \vec{r},\;\sum_{k=1}^N m_k\rightarrow\int_V\rho\mathrm{d}V.\] 其中 \(\rho\) 为质量密度. 此时惯性张量有: \[I_{ij} = \int \left( r^2\delta_{ij} -x_ix_j \right)\rho \mathrm{d}V.\]
- 动能
\[T = \frac{1}{2}m_k \dot{\vec{r}}_k\cdot \vec{v}^k = \frac{1}{2}m_k\dot{\vec{r}}_k\cdot \left( \vec{\omega}\cdot \vec{r}_k \right)= \frac{1}{2}\vec{\omega}\cdot \vec{L}.\] 由 \(\vec{L} = \mathbb{I}\vec{\omega}\) 可得 \[T = \frac{1}{2}\vec{\omega}^T \mathbb{I}\vec{\omega} = \frac{1}{2}I_{\vec{n}}\omega^2.\] 其中 \(I_{\vec{n}} = m^k d_k^2\), \(d_k\) 为 \(\vec{r}_k\) 到转轴 \(\vec{n}\) 的距离. 是故不仅角速度大小影响动能,转轴去向也影响动能.
只有在定轴转动时, 定轴惯量是个常量. 但是, 定点转动是转轴不断变化的定轴转动. 即使角速度不变, 动能也可能改变.
2.2. 惯量矩阵的若干定理
- 平行轴定理
- 相对于某基点\(O\)的惯量矩阵等于: 相对于质心的惯量矩阵加上把所有质量集中于质心位置再相对于\(O\)的惯量矩阵.
- 垂直轴定理
- 对平面薄层,相对于平面内任意两个相互垂直的定轴惯量之和, 等于相对于过这两定轴的交点且垂直于平面的垂直轴的惯量.
- 会聚轴定理
- 相对于过基点 \(O\) 的某定轴 \(\vec{n}\) 惯量 \(I_{\vec{n}}\) 过基点的惯量矩阵 \(\mathbb{I}\), 有: \[I_{\vec{n}} = \vec{n}^T \mathbb{I} \vec{n}.\]
2.3. 惯量主轴和主轴系
已知: \[\vec{L} = \mathbb{I}\vec{\omega}, \;T = \frac{1}{2}\vec{\omega}^T \mathbb{I}\vec{\omega}, \;\mathbb{I} = m \left[ \left( \vec{x}_{(k)}^T\vec{x}^{(k)} \right)\mathbf{I}_{3} - \vec{x}^{(k)}\vec{x}_{(k)}^T\right].\]
惯量矩阵的矩阵元依赖于坐标原点和坐标取向. 则尝试通过适当的坐标取向使得 \(\mathbb{I}\) 为对角阵. \[\mathbb{I} = m \left[ \left( \vec{x}_{(k)}^T\vec{x}^{(k)} \right)\mathbf{I}_{3} - \vec{x}^{(k)}\vec{x}_{(k)}^T\right]\Rightarrow \mathbb{I}^{\prime} = m \left[ \left( {\vec{x}^{\prime}}_{(k)}^T {\vec{x}^{\prime}}^{(k)} \right) \mathbf{I}_{3} - {\vec{x}^{\prime}}^{(k)}{\vec{x}^{\prime}}_{(k)}^T\right]. \] 其中 \({\vec{x}^{\prime}}^{(k)} = \mathcal{A}\vec{x}^{(k)}\), \({{\vec{x}^{\prime}}^{(k)}}^T = {\vec{x}^{(k)}}^T \mathcal{A}^T\). \(\mathcal{A}\) 为正规变换, 满足 \(\mathcal{A}^T\mathcal{A} = \mathcal{A}\mathcal{A}^T = \mathbf{I}_n\), 可得: \[\mathbb{I}^{\prime} = \mathcal{A}\mathbb{I}\mathcal{A}^T = (\mathcal{A}^T)^{-1}\mathbb{I}\mathcal{A}^T.\] 当 \(\mathbb{I}^{\prime}\) 为对角阵时, 这个问题转化为求 \(\mathbb{I}\) 的本征值.
新坐标系中的角动量 \(\vec{L}^{\prime}\) 有:
\begin{aligned} \vec{L}^{\prime} &= \mathcal{A}\vec{L} = \mathcal{A}\mathbb{I}\vec{\omega}\\ &= \mathcal{A}\mathbb{I}\mathcal{A}^T\mathcal{A}\vec{\omega} = \mathbb{I}^{\prime}\vec{\omega}^{\prime}\\ &= \begin{pmatrix} I_1 & 0 & 0 \\ 0 & I_2 & 0 \\ 0 & 0 & I_3 \end{pmatrix} \begin{bmatrix} \omega^{\prime}_1 \\ \omega^{\prime}_1 \\ \omega^{\prime}_1 \end{bmatrix}\\ &= \begin{bmatrix} I_1\omega^{\prime}_1 \\ I_2\omega^{\prime}_1 \\ I_3\omega^{\prime}_1 \end{bmatrix}. \end{aligned}动能有: \[T = \frac{1}{2}\vec{\omega}^T\mathbb{I}\vec{\omega} = \frac{1}{2}{\vec{\omega}^{\prime}}^T\mathbb{I}\vec{\omega}^{\prime} = \frac{1}{2}\left( I^i{\omega^{\prime}_i}^2 \right)\] 其中 \(i = 1, 2, 3\).
- 主轴系
- 使得 \(\mathbb{I}\) 为对角阵的坐标系称为 主轴系.
- 其坐标轴为 惯量主轴
- 对相应主轴的转动惯量称为 主惯量.
2.4. 主轴系求法
\[\begin{pmatrix} I_1 & 0 & 0 \\ 0 & I_2 & 0 \\ 0 & 0 & I_3 \end{pmatrix} = \mathbb{I}^{\prime} = (\mathcal{A}^T)^{-1}\mathbb{I}\mathcal{A}^T.\] ⇒ 求 \(\mathbb{I}\) 的本征值.
- 对称面
- 对称面将刚体方程具有镜面对称性的两部分.
- 对称面定理
- 选取对称面上的点作为基点, 则必有一根主轴垂直于该对称面.
- 对称轴定理
- 选取对称轴上一点作为基点, 则对称轴是一根主轴, 在垂直于对称轴平面上, 任何两根相互正交的轴都构成主轴, 且对应的主惯量相等.
2.5. 惯量椭球—刚体惯量矩阵的几何表示
由会聚轴定理可知: 已知 \(O\) 点惯量矩阵 \(\mathbb{I}\), 过 \(O\) 点定轴 \(\vec{n}\) 转动惯量 \(I_{\vec{n}} = \vec{n}^T\mathbb{I}\vec{n}\). 刚体绕 \(\vec{n}\) 以角速度 \(\omega\) 转动时,
- 角动量沿 \(\vec{n}\) 方向分量为: \(L_{\vec{n}} = I_{\vec{n}}\omega\),
- 动能为: \(T = \frac{1}{2}I_{\vec{n}}\omega^2\).
需要尽快求得 \(I_{\vec{n}}\) ⇒ 惯量椭球.
从基点出发, 沿任意转轴\(\vec{n}\)方向取 \(P\) 点, 使得有: \[\vec{OP} = \vec{x} = \frac{\vec{n}}{\sqrt{I_{\vec{n}}}}. \;\vec{x} = \begin{pmatrix} x_1 \\ x_2 \\ x_3 \end{pmatrix}, \;\vec{n} = \begin{pmatrix} n_1 \\ n_2 \\ n_3 \end{pmatrix}.\] 易得: \[\vec{x}^T\mathbb{I}\vec{x} = \frac{\vec{n}^T\mathbb{I}\vec{n}}{I_{\vec{n}}} = 1\Rightarrow \vec{x}^T\mathbb{I}\vec{x} = I_{ij}x^ix^j = 1.\]
改变转轴 \(\vec{n}\) 方向, \(P\) 点集合满足的方程为 椭圆方程. 其描述的椭球面为 惯量椭球, 满足以下性质:
- 从基点出发, 沿任意方向 \(\vec{n}\) 画一条直线, 直线与惯量椭球面的交点到原点距离的平方的倒数, 就是刚体绕定轴\(\vec{n}\)的转动惯量. \[\vec{x}=\frac{\vec{n}}{\sqrt{I_{\vec{n}}}}\Rightarrow \vec{x}^T\vec{x} = \frac{\vec{n}^T\vec{n}}{I_{\vec{n}}} = \frac{1}{I_{\vec{n}}} = \left| \vec{x} \right|^2.\]
- 设转轴方向 \(\vec{n}\) 交惯量椭球于点 \(N\), 称为 极点\(N\), 则: \[\vec{x}_N =\frac{\vec{n}}{\sqrt{I_{\vec{n}}}} = \frac{1}{\sqrt{I_{\vec{n}}}}\frac{\vec{\omega}}{\omega} = \frac{\vec{\omega}}{\sqrt{2T}}.\] 其中 \(T = \frac{1}{2}I_{\vec{n}}\omega^2\).
又因为 \(\vec{x}^T\mathbb{I}\vec{x} - 1 = 0\), 可得: \[\nabla \left( \vec{x}^T \mathbb{I}\vec{x} -1 \right)\big{|}_N = \cdots = \frac{2\vec{L}}{\sqrt{2T}}.\] \[r_L = \vec{x}_N \cdot \frac{\vec{L}}{L} = \frac{\sqrt{2T}}{L} \Rightarrow L = \frac{\sqrt{2T}}{r_L}.\]
2.6. Euler 动力学方程
已知 \[\frac{\mathrm{d}\vec{L}}{\mathrm{d}t} = \vec{N} = \vec{r}_l\times\vec{F}^l.\] 其中 \(\vec{r}_l, \vec{F}_l\) 为刚体质点 \(m_l\) 位置矢量与所受外力. 此角动量为惯性系或平动系上观察到的角动量. 本体系有: \[\frac{\mathrm{d}\vec{L}}{\mathrm{d}t} = \left( \frac{\mathrm{d}\vec{L}}{\mathrm{d}t} \right)_{\mathit{\Sigma}^{\prime}} + \vec{\omega}\times \vec{L} = \vec{N}.\] 可得: 本体系中惯量矩阵不随时间改变.
若取惯量主轴为直角坐标系,则主惯量也不随时间改变.故整理得:
\begin{cases} I_1\dot{\omega}_1 - \omega_2\omega_3(I_2 - I_3) = N_1,\\ I_2\dot{\omega}_2 - \omega_3\omega_1(I_3 - I_1) = N_2,\\ I_3\dot{\omega}_3 - \omega_1\omega_2(I_1 - I_2) = N_3. \end{cases}上式即 Euler 动力学方程.